
Novel actuation technologies are studied for their ability to provide precise stimuli to MEMS inertial sensors to provide on-board calibration capabilities. The Oldham group has focused on dynamic modeling and high-accuracy position/velocity estimation from actuation stages for in situ calibration of gyroscopes.
Research topics include:
- Sensor design and operation for low-power rotary actuator system identification
- Sensing and control of a magnetoelastic rotary microactuator (actuator by Gianchandani group, Michigan Electrical Engineering)
- Trajectory design, velocity estimation, and control for calibration with a vibratory piezoelectric actuator (actuator by Najafi group, Michigan Electrical Engineering)
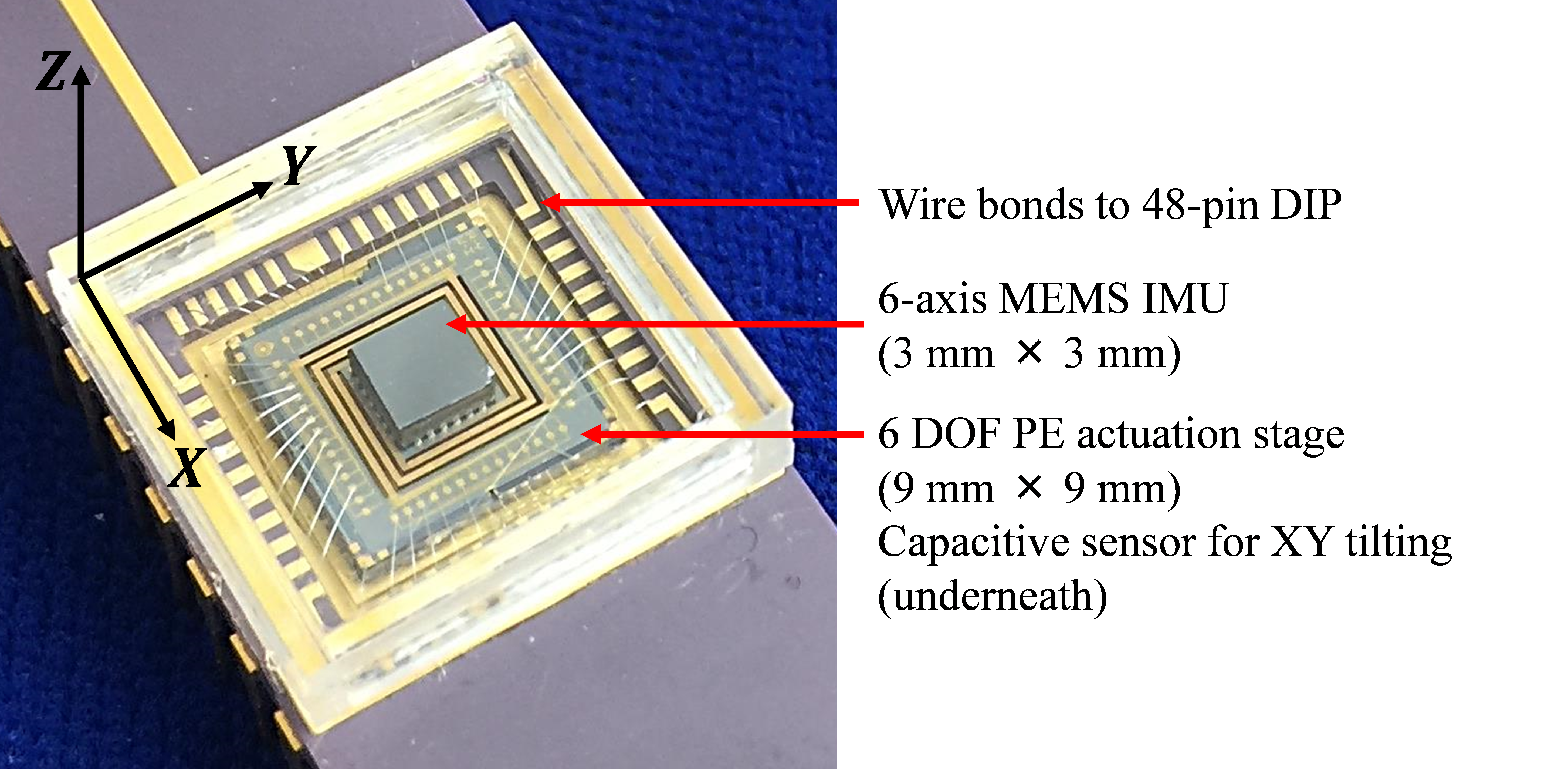
In each of these settings, novel designs of capacitive sensors and motion estimation methods are developed for measuring multi-axis motion of a micro-stage that is used for in situ calibration of an on-stage MEMS gyroscope. In order to be adaptive to environmental perturbation such as temperature changes, nonlinear capacitive sensor models with parameter identification procedures are developed and integrated into an extended Kalman filter framework to estimate multi-axis motion. The measured tilting motion by the stage is compared to MEMS gyroscope’s readout for in situ calibration.
Collaborators:
Prof. Khalil Najafi, University of Michigan Dept. of Electrical Engineering and Computer Science
Prof. Yogesh Gianchandani, University of Michigan Dept. of Electrical Engineering and Computer Science / Mechanical Engineering
Dr. E.E. Aktakka, University of Michigan Electrical Engineering and Computer Science
Dr. Scott Green, University of Michigan Electrical Engineering and Computer Science
Sponsor:
DARPA
Related Publications:
- Y. Chen, E.E. Aktakka, J.-K. Woo, K. Najafi, and K.R. Oldham, “On-chip capacitive sensing and tilting motion estimation of a micro-stage for in situ gyroscope calibration,” Mechatronics, vol. 56, 2018. (pdf)
- Y. Chen, K. Oldham, “Kalman filter estimation with edge detection-based hybrid sensing,” Proceedings of 2016 American Controls Conference, Boston, MA, July 2016. (pdf)
- J. Qu, J. Tang, Y. Gianchandani, K.R. Oldham, and S.R. Green, “Dynamic modeling of a bidirectional magnetoelastic rotary micro-motor,” Sensors and Actuators A: Physical, vol. 223, no. 1, pp. 49-60, 2015. (pdf)
- B. Edamana, Y. Chen, D. Slavin, E.E. Aktakka, and K.R. Oldham, “Estimation with threshold sensing for gyroscope calibration using a piezoelectric microstage,” IEEE Transactions on Control Systems Technology, vol. 23, no.5, pp. 1943-1951, 2015 (pdf)
- J. Qu and K. R. Oldham, “Position estimation for a capacitively-sensed magnetoelastic rotary microstage using an extended Kalman smoother,” Proceedings of the American Controls Conference, Portland, OR, 2014.
- B. Hahn and K.R. Oldham, “Sensing strategies to reduce Power Consumption of Recursive Least Squares Parameter Identification of Autonomous Microsystems,” Proceedings of the 2013 American Controls Conference, Washington, DC, July 2013.
- B. Hahn and K.R. Oldham, “Sensing Parameter Selection for Ultra-Low-Power System Identification,” Proceedings of the American Controls Conference, Montreal, QC (2012)